

Smart Cane
Location
CoLab, COM 346
Start Date
30-4-2026 3:45 PM
Document Type
Poster
Description
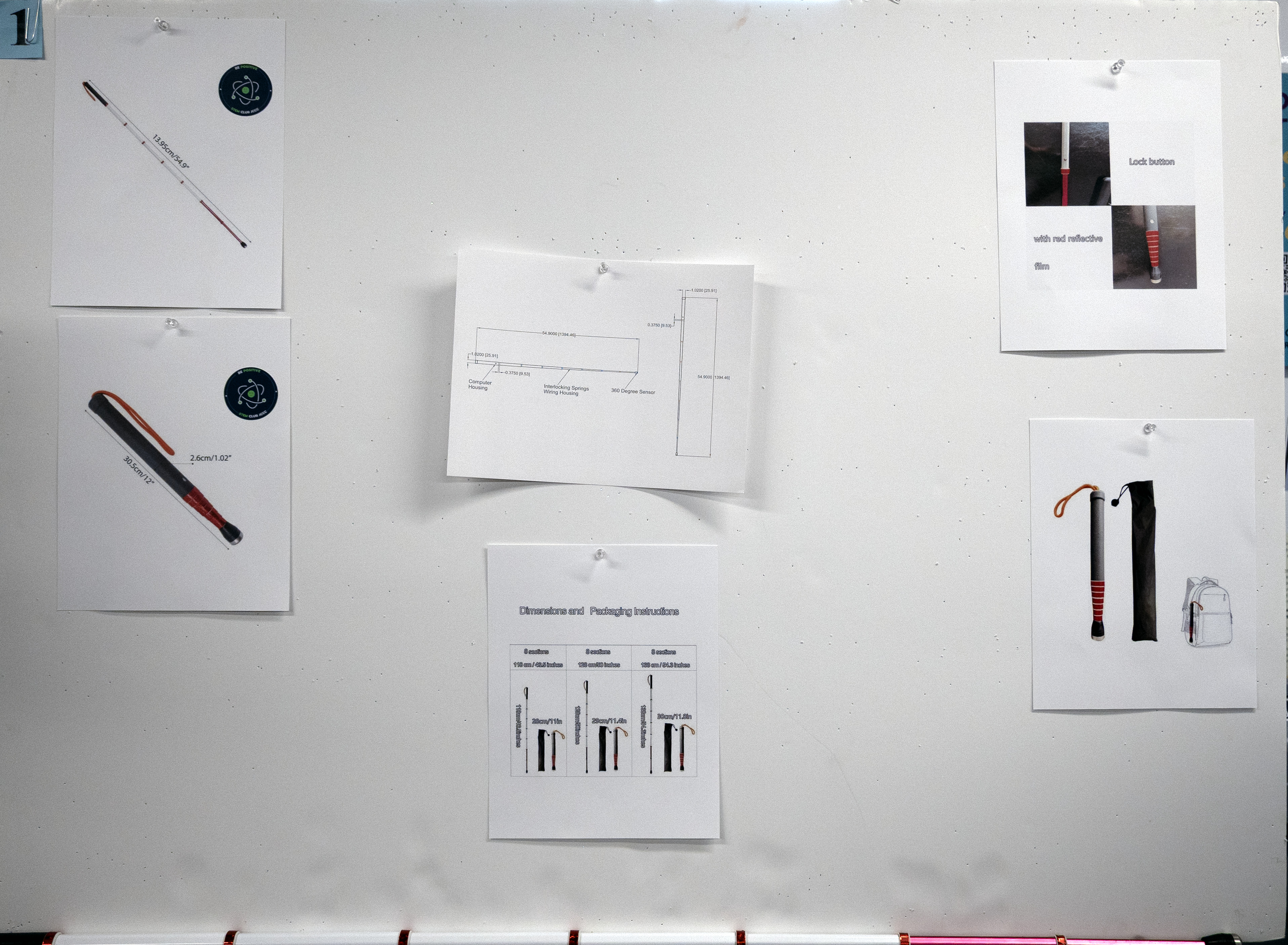
The STEM Club presents the development of a smart cane designed to enhance independence, safety, and accessibility for individuals with visual impairments and other mobility challenges. The project originated from direct observation of navigation difficulties in familiar environments, highlighting limitations in traditional assistive tools. In response, this innovation integrates artificial intelligence, embedded sensors, and real-time feedback systems to improve spatial awareness and obstacle detection. The cane utilizes a combination of ultrasonic sensors, computer vision, and adaptive algorithms to identify objects at various heights and distances, addressing common hazards such as overhanging obstacles that standard canes often miss. Additionally, the system provides intuitive haptic and auditory feedback, allowing users to interpret environmental information without cognitive overload. The design emphasizes user-centered customization, enabling adjustments based on individual mobility needs and preferences. Beyond functionality, the project aligns with broader accessibility frameworks, including compliance with ADA-related standards, to ensure equitable usability in public and educational spaces. By merging engineering, human-centered design, and accessibility research, this smart cane represents a step toward redefining assistive technology not merely as a tool for navigation, but as a platform for autonomy, dignity, and inclusive innovation.
Image
Smart Cane
CoLab, COM 346
The STEM Club presents the development of a smart cane designed to enhance independence, safety, and accessibility for individuals with visual impairments and other mobility challenges. The project originated from direct observation of navigation difficulties in familiar environments, highlighting limitations in traditional assistive tools. In response, this innovation integrates artificial intelligence, embedded sensors, and real-time feedback systems to improve spatial awareness and obstacle detection. The cane utilizes a combination of ultrasonic sensors, computer vision, and adaptive algorithms to identify objects at various heights and distances, addressing common hazards such as overhanging obstacles that standard canes often miss. Additionally, the system provides intuitive haptic and auditory feedback, allowing users to interpret environmental information without cognitive overload. The design emphasizes user-centered customization, enabling adjustments based on individual mobility needs and preferences. Beyond functionality, the project aligns with broader accessibility frameworks, including compliance with ADA-related standards, to ensure equitable usability in public and educational spaces. By merging engineering, human-centered design, and accessibility research, this smart cane represents a step toward redefining assistive technology not merely as a tool for navigation, but as a platform for autonomy, dignity, and inclusive innovation.
Comments
The faculty mentor for this project was Elaine Hembree.