

Location
CoLab, OCB 100
Start Date
25-4-2024 9:00 AM
Document Type
Poster
Description
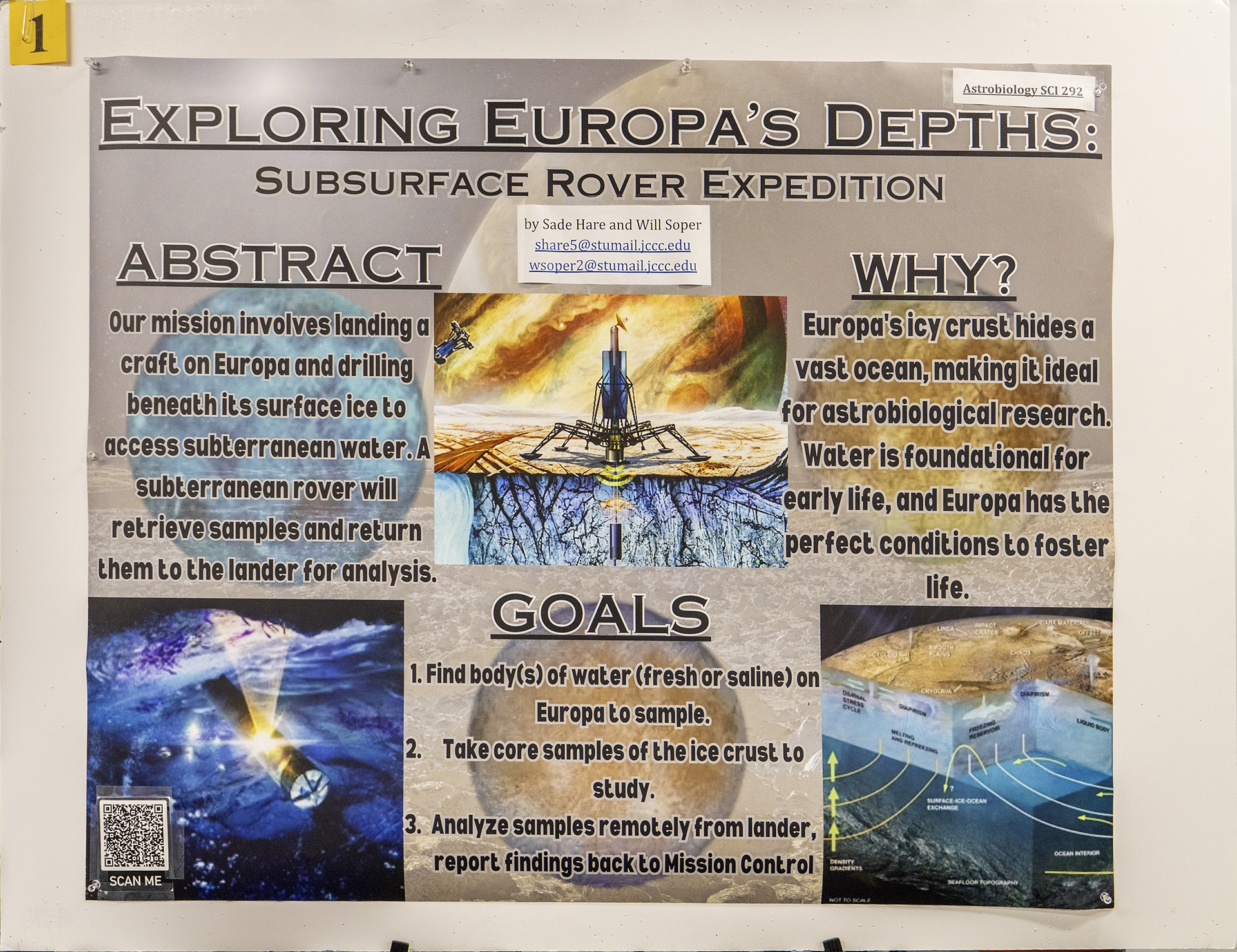
We propose a pioneering space mission aimed at drilling into the water reserve of Europa, one of Jupiter's icy moons. Europa is believed to possess a vast ocean beneath its icy crust, making it a compelling target for astrobiological research and potential habitability. In addition, we propose not only landing a research craft on Europa but also drilling underneath the surface ice in the hopes of accessing a subterranean water deposit for sample acquisition. A subterranean rover will be deployed to retrieve samples and return them to the lander for analysis. The mission would be an unmanned telerobotic vessel to reduce cost and risk, relying on a gravity assist maneuver to reach Jupiter’s gravitational pull. The subsurface rover, outfitted with sonar, optical imagers, a sampler, and LiDAR, will deploy from the lander. The lander, in turn, will possess a sample processor to analyze and transmit the rover's findings.
Image
Exploring Europa’s Depths: Subsurface Rover Expedition
CoLab, OCB 100
We propose a pioneering space mission aimed at drilling into the water reserve of Europa, one of Jupiter's icy moons. Europa is believed to possess a vast ocean beneath its icy crust, making it a compelling target for astrobiological research and potential habitability. In addition, we propose not only landing a research craft on Europa but also drilling underneath the surface ice in the hopes of accessing a subterranean water deposit for sample acquisition. A subterranean rover will be deployed to retrieve samples and return them to the lander for analysis. The mission would be an unmanned telerobotic vessel to reduce cost and risk, relying on a gravity assist maneuver to reach Jupiter’s gravitational pull. The subsurface rover, outfitted with sonar, optical imagers, a sampler, and LiDAR, will deploy from the lander. The lander, in turn, will possess a sample processor to analyze and transmit the rover's findings.
Comments
The faculty mentors for this project were Steven Giambrone and Doug Patterson, Astrobiology.