

Location
CoLab, COM 100
Start Date
1-5-2025 8:30 AM
Document Type
Poster
Description
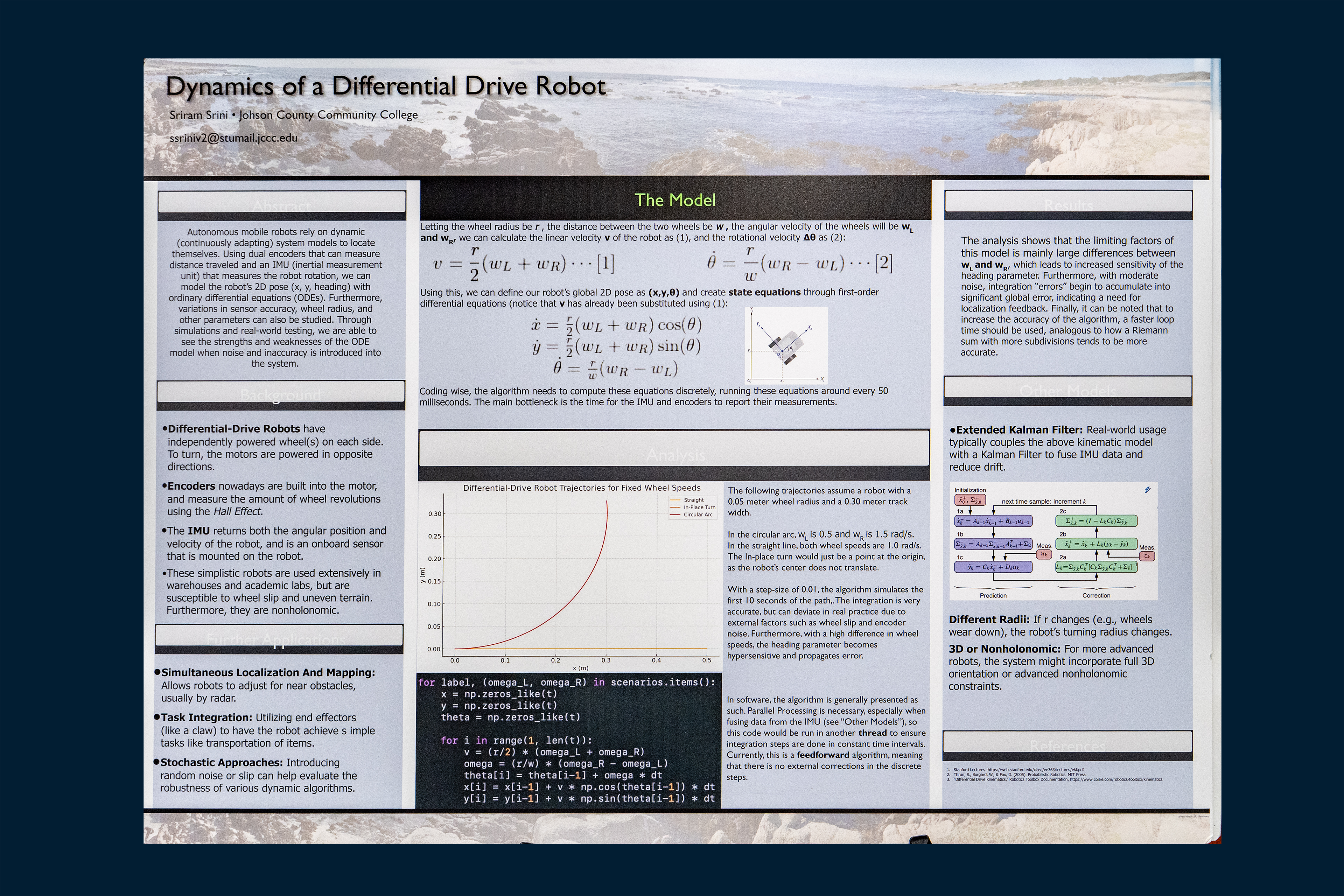
Autonomous mobile robots rely on dynamic (continuously adapting) system models to locate themselves. Using dual encoders that can measure distance traveled and an IMU (inertial measurement unit) that measures the robot rotation, we can model the robot’s 2D pose (x, y, heading) with ordinary differential equations (ODEs). Furthermore, variations in sensor accuracy, wheel radius, and other parameters can also be studied. Through simulations and real-world testing, we are able to see the strengths and weaknesses of the ODE model when noise and inaccuracy is introduced into the system.
Image
Dynamics of a Differential Drive Robot
CoLab, COM 100
Autonomous mobile robots rely on dynamic (continuously adapting) system models to locate themselves. Using dual encoders that can measure distance traveled and an IMU (inertial measurement unit) that measures the robot rotation, we can model the robot’s 2D pose (x, y, heading) with ordinary differential equations (ODEs). Furthermore, variations in sensor accuracy, wheel radius, and other parameters can also be studied. Through simulations and real-world testing, we are able to see the strengths and weaknesses of the ODE model when noise and inaccuracy is introduced into the system.
Comments
The faculty mentor for this project was Brenda Edmonds, Mathematics.